
About me
Hardworking and passionate mechatronics engineer, oriented towards robotics and related fields. Enthusiastic about shaping ideas into reality using CAD, programming, and similar tools. Team leader, always determined to find innovative and creative solutions!
Education
2018 - 2023
B.S Mechatronics Engineering - ITESM
2021 - 2022
Exchange year- UC Berkeley
2014- 2018
Student - ASF
2015- 2016
Student - Mercersburg
My Skills

Leadership

Solidworks

Python

HTML

Arduino

Teamwork

Matlab

Office
My Portfolio
Explore a collection of my creative adventures over the years. Here's a sneak peek into the projects that fuel my passion!
Portfolio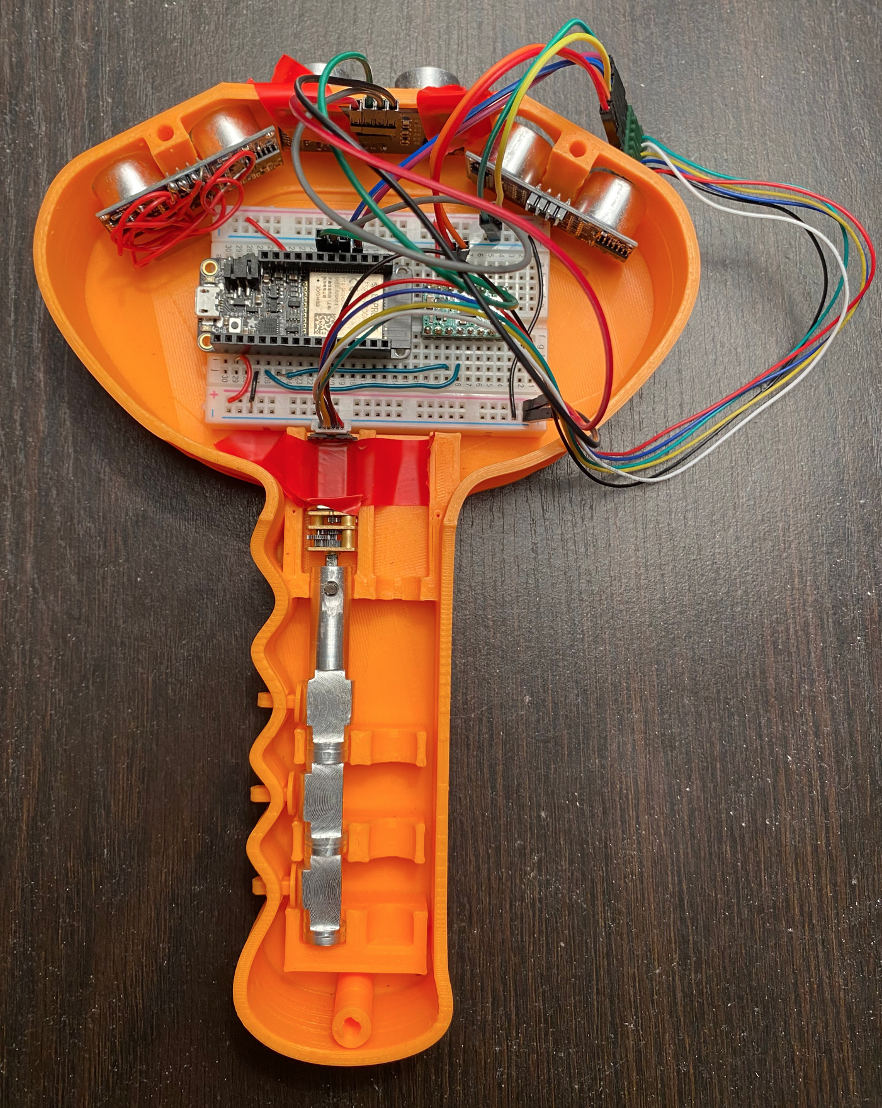
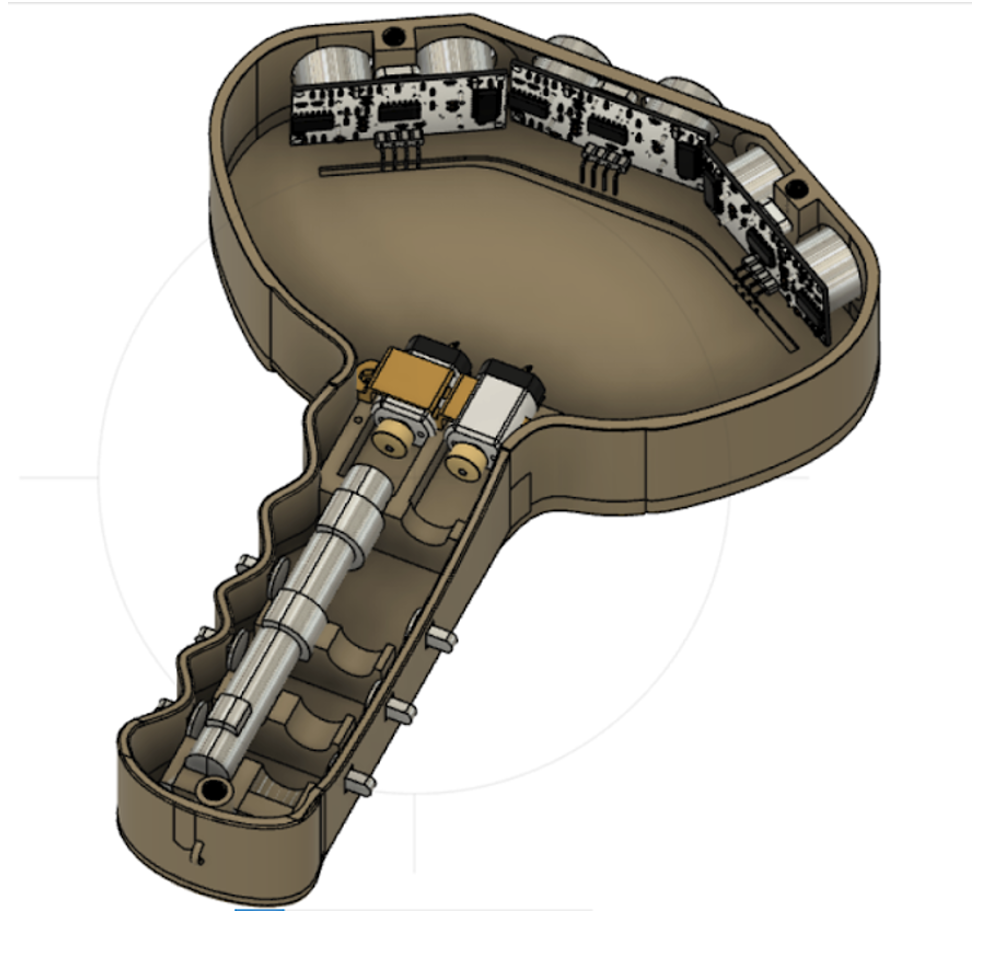

VIVID
(Visually Impared Visualization Device)
UC Berkeley
aug 2021 - may 2022
Objective:
Create a mechatronics system with an original mechanical design, electrical components, and control system
Description:
A device targeted towards visually impared people, VIVID allows the user to visualize how far away obstacles are
Skills Aquired:
- Arduino IDE with ESP32
- Mechanical design (drive shaft system and overall system skeleton)
- Time Management
Team:
Conor Van Bibber, Yilkal Andualem, Frank Aliaga Auqui, Aldo Walle

VIVID
(Visually Impared Visualization Device)





Garden Bot
ITESM Santa Fe
Aug 2022 - May 2023
Objective:
The objective was to develop a mechatronics system with an entrepreneurial spirit that could contribute to solving real-world problems.
Description:
GardenBot is an autonomous rover-style robot, designed as a drought-tolerant watering system with an IoT monitoring system, that drives around and waters your garden automatically, while also having a docking station to recharge its water tank.
Skills aquired:
- Arduino IoT programming
- Mechanical and electrical design
- Rover mechanics
- Budgeting/Cost analysis
Team:
Samuel Maraima, Joaquin Bonavides, Michael Allen
Garden Bot
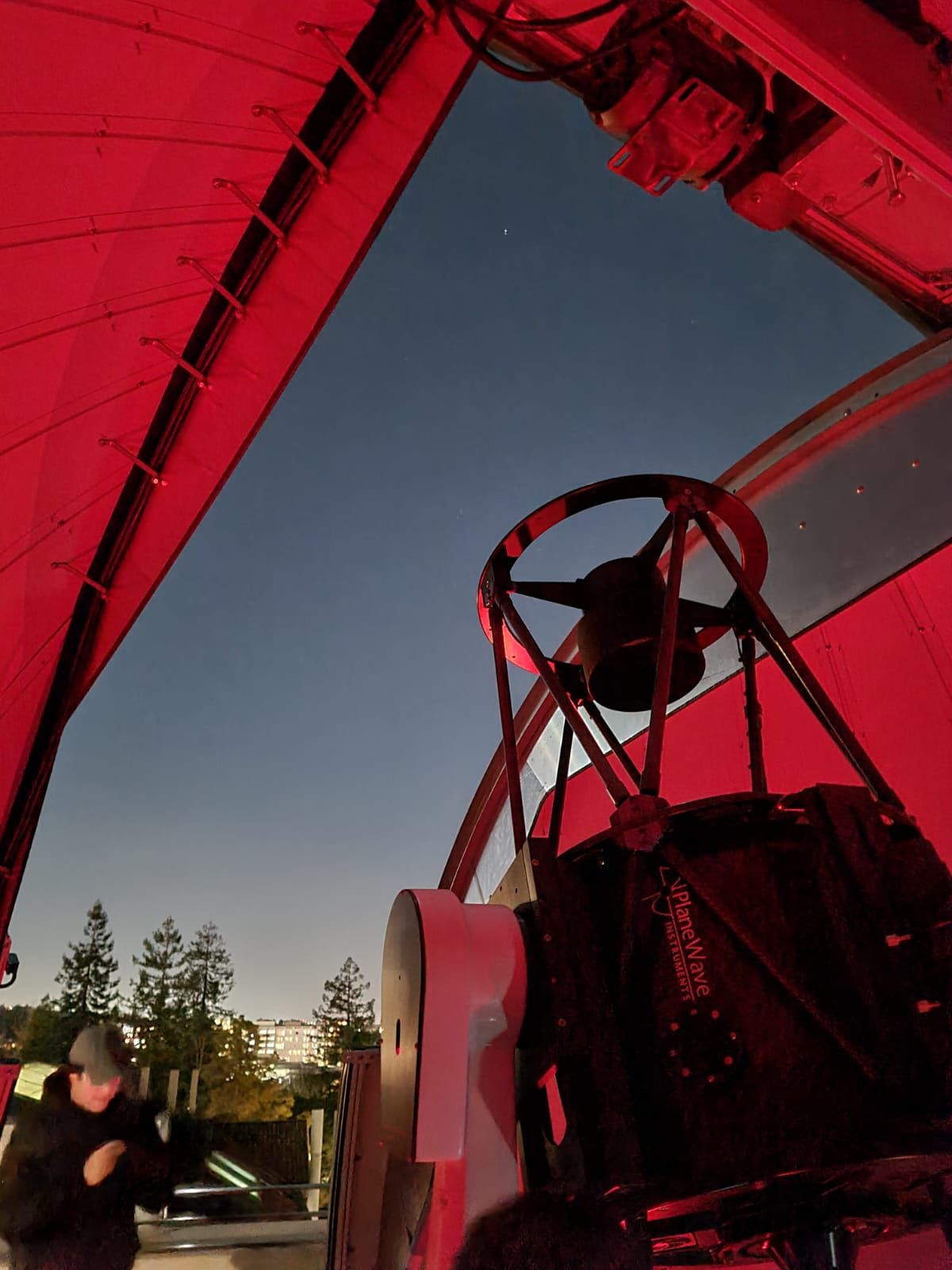


ULAB
UC Berkeley (Go Bears!)
Aug 2021 - May 2022
Objective:
The project analyzes the radial velocities of 28 young stars with APF data from Lick Observatory to identify binary systems, characterizing companions through mass and orbital period calculations.
Description:
In Python, we developed a radial velocity pipeline utilizing raw APF stellar spectra to create time series, enabling the detection of spectroscopic binary systems. Understanding these systems is crucial for determining star masses and provides insights into planetary formation processes, particularly relevant for young stars with protoplanetary disks.
Skills aquired:
- Python
- Astrophysics
- Reasearch
- Lots of patience
Team:
Melissa Gross, Olivia Kienzle, Ricardo Leduc Almaraz, Joseph Santana, Angel Tu, Zoe Ko

ULAB
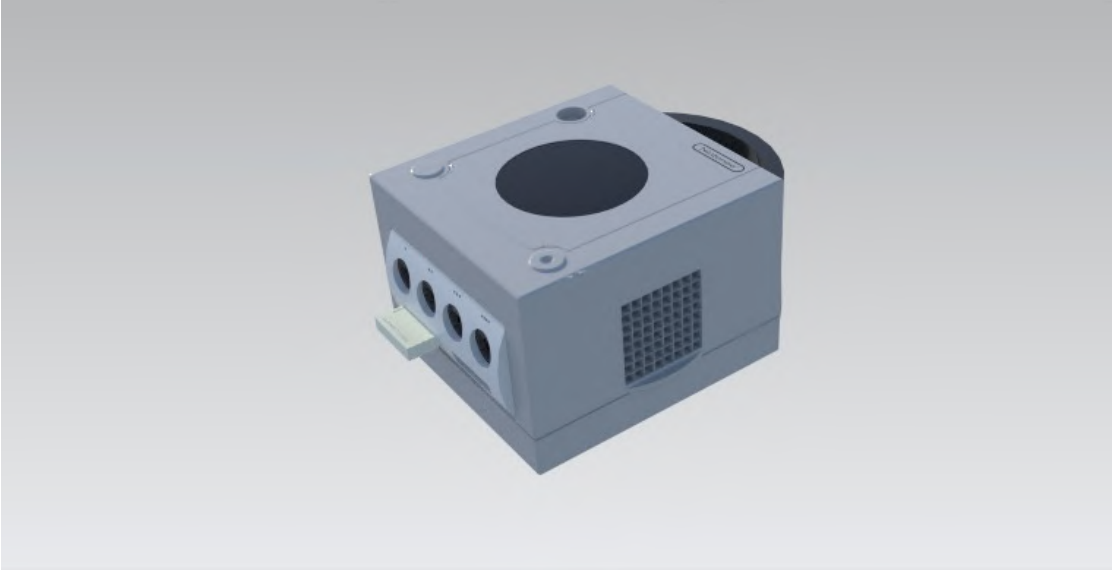

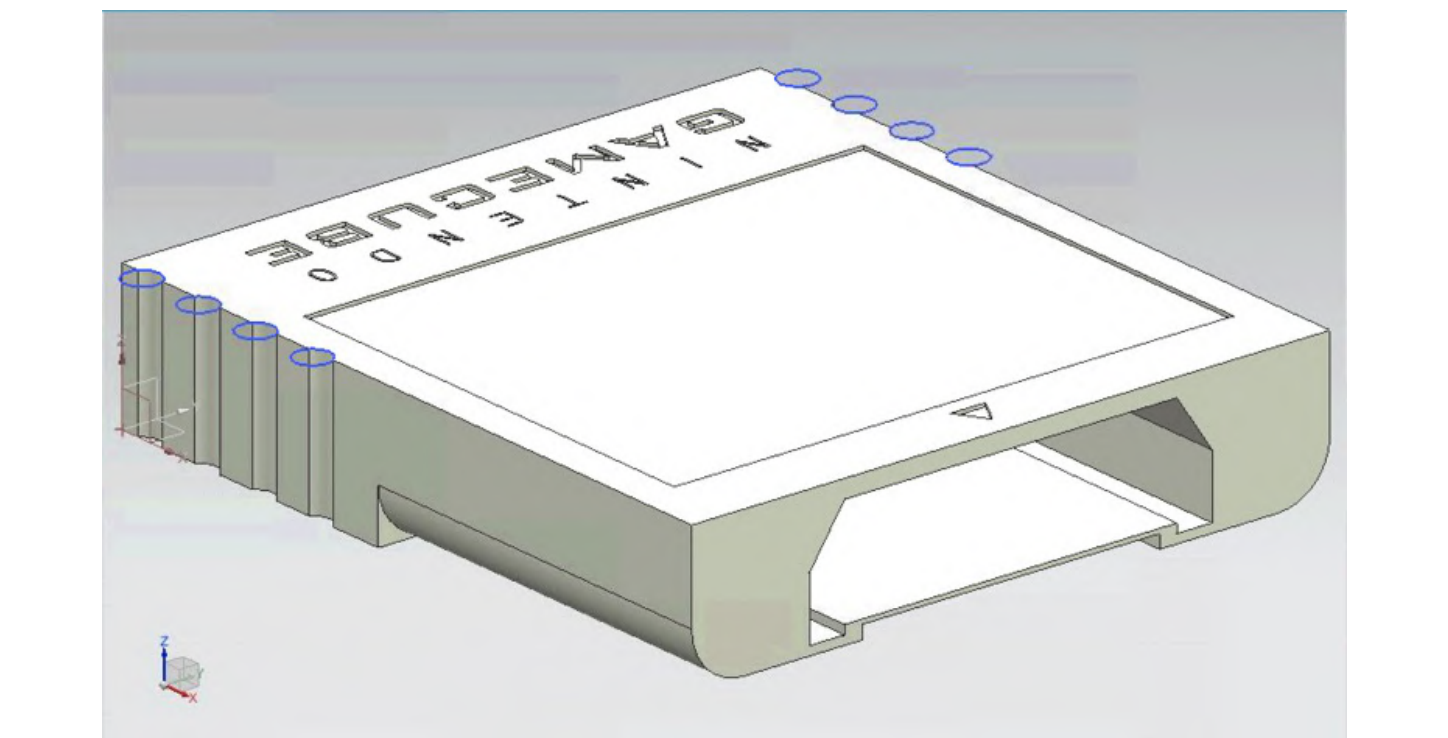

GameCube
ITESM
January 2020 - Mayy 2022
Objective:
In my work with NX Cad, I recreated a real-world object—my Nintendo GameCube—leveraging my passion for video games, and the primary objective was to meticulously replicate its components and assemble them in the CAD environment.
Description:
To replicate the Gamecube, I identified and designed its features, creating 11 parts in my first experience with CAD and NX Software, fostering my passion for CAD and engineering as I compared the virtual model to the real object.
Skills aquired:
- CAD Design
- Sketching
- NX Software
GameCube
Contact Me
Contact me here
Thank you so much for getting in touch! Your message means a lot, and I'm excited about the possibility of collaborating or hearing your thoughts. Feel free to reach out whenever you have questions, ideas, or just want to chat. Until then, take care and all the best!
: Mexico City, Mexico
: leducricardo@gmail.com